We implemented a module TRAJECTORY which produces a visualization of
the set
![]() as
described on page
as
described on page ![[*]](cross_ref_motif.gif) . See Fig. 5.6
for another example where this technique was used.
. See Fig. 5.6
for another example where this technique was used.
Sometimes
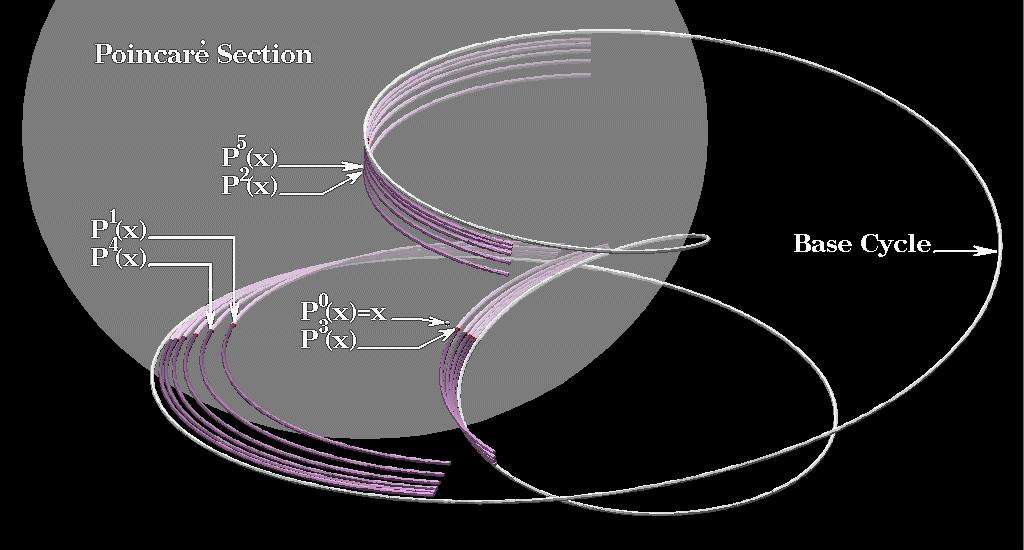
pq, q>1, is more interesting to investigate
than
p. This is the case, for example, when base
cycle
![]() itself pierces the Poincaré section q times
during one complete loop (see Fig. 5.7).
In the given example
itself pierces the Poincaré section q times
during one complete loop (see Fig. 5.7).
In the given example
![]() intersects
intersects
![]() two
more times before it returns to the initial intersection point and
thus closes the cycle. The behavior of trajectories
two
more times before it returns to the initial intersection point and
thus closes the cycle. The behavior of trajectories
![]() near
near
![]() are better described by one
arbitrary
are better described by one
arbitrary
![]() and
p3(x) rather than
x and
p(x). In
fact any pair
and
p3(x) rather than
x and
p(x). In
fact any pair
![]() ,
0
,
0![]() j<q, can be chosen for this type of analysis.
j<q, can be chosen for this type of analysis.
The user can change the default value of q, i.e., 1, such that
all the previously discussed visualization techniques, e.g., spot
noise, are adapted to this new parameter setting. Moreover we
allow the user to specify that only those
intersections
![]()
![]()
![]() are
considered where
are
considered where
![]() (
f being the underlying 3D flow). Only those
points on trajectory
(
f being the underlying 3D flow). Only those
points on trajectory
![]() are of interest where
are of interest where
![]() crosses the Poincaré section with the same orientation.
This means that
crosses the Poincaré section with the same orientation.
This means that
![]() crosses
crosses
![]() in both cases
either in front-to-back or back-to-front orientation.
Fig. 5.8(a) was rendered with q=1 and
Fig. 5.8(b) with q=3. In this case the
base cycle pierces
in both cases
either in front-to-back or back-to-front orientation.
Fig. 5.8(a) was rendered with q=1 and
Fig. 5.8(b) with q=3. In this case the
base cycle pierces
![]() three times during one complete
loop.
three times during one complete
loop.
Although there are still some artifacts in
Fig. 5.8(b) which are due to the limited size
of
![]() ,
it is more expressive than
Fig. 5.8(a). The egg-shaped intersection of
an invariant torus (containing the base cycle) and Poincaré
section
,
it is more expressive than
Fig. 5.8(a). The egg-shaped intersection of
an invariant torus (containing the base cycle) and Poincaré
section
![]() can be clearly seen as dark line around the
center of this image. Furthermore the unstable cycle within this
torus cross-section can be distinguished as a critical point of
the Poincaré map
p. The radial repulsion away from this critical
point towards the torus is well represented by the star like spot
noise texture.
can be clearly seen as dark line around the
center of this image. Furthermore the unstable cycle within this
torus cross-section can be distinguished as a critical point of
the Poincaré map
p. The radial repulsion away from this critical
point towards the torus is well represented by the star like spot
noise texture.
The visualization of
pn, n>1, is more difficult than
visualizing
p itself. A technique we investigated for the
representation of
pn, n increasing, is image
warping [11]. A module WARP was implemented
that approximates
p by a warp function
w on
the basis of
![]() and
and
![]() where
where
![]() can be
chosen to be either a jittered or regular set of line segments
spread over
can be
chosen to be either a jittered or regular set of line segments
spread over
![]() .
This approximation is necessary since
evaluating the Poincaré map for all the points on the Poincaré section
would cause extremely high computational efford - for each single
evaluation potentially thousands up to millions of numerical
integration steps are necessary - thus only a few evaluations are
done, i.e.,
.
This approximation is necessary since
evaluating the Poincaré map for all the points on the Poincaré section
would cause extremely high computational efford - for each single
evaluation potentially thousands up to millions of numerical
integration steps are necessary - thus only a few evaluations are
done, i.e.,
![]() ,
and warping is used to
approximate
pn.
,
and warping is used to
approximate
pn.
WARP loads an initial texture
![]() onto
onto
![]() and then applies the warp transformation
n times, where n is specified via a parameter of WARP.
The resulting texture
and then applies the warp transformation
n times, where n is specified via a parameter of WARP.
The resulting texture
![]()
![]() w-n (see Fig. 5.9)
placed on
w-n (see Fig. 5.9)
placed on
![]() gives a good impression of the main
characteristics of
pn. See Fig. 5.10 for an images
rendered using this technique.
gives a good impression of the main
characteristics of
pn. See Fig. 5.10 for an images
rendered using this technique.
![\framebox[\textwidth]{
\begin{tabular*}{.93\linewidth}{@{}@{\extracolsep{\fill}...
...warp01.ps}
& \includegraphics[height=31mm]{pics/rc_warp11.ps}
\end{tabular*} }](img214.gif) |
The reason why we approximate Poincaré map
p by the use of a
warping function instead of using
p directly for the
transformation of the texture is that
p is usually rather costly
to compute. Warp function WARP, on the other hand, is capable
of approximating
p quite good if
warping parameters are chosen appropriately. At least an idea of
pn is gained using this technique.
![\framebox[\textwidth]{
\includegraphics[width=.93\textwidth]{pics/fig-pq.ps}
}](img198.gif)
![\framebox[\textwidth]{
\begin{tabular*}{.93\linewidth}{@{}@{\extracolsep{\fill}...
...eight=47mm]{pics/fig-p3.ps}
\\ {\small{}(a)}
& {\small{}(b)}
\end{tabular*} }](img199.gif)
![\framebox[\textwidth]{
\includegraphics[scale=1]{figs/fig-warp.eps}
}](img213.gif)
{kind=link}