However, the entirety of all kind of dynamical systems is much too
diverse to be addressed by a single visualization technique. There is
too much difference between, for instance, a discrete and a
continuous dynamical system. In general, a proper visualization
technique is dependent on the kind of data to be visualized, and the
specific goal of investigation. Thus, a separation of techniques
according to the specific sub-class of dynamical systems
addressed, is necessary.
One possible way of classifying visualization techniques for dynamical systems is to look at the data scale they focus on. Stressing the aim of maximizing information transmission through the visual channel, it becomes clear that different visualization techniques are necessary for different scales. Investigating a specific dynamical system locally allows to view many more details simultaneously than analyzing an entire class of dynamical systems. A separation into three levels of data scale is useful for identifying different kinds of visualization techniques (see Fig. 1.3):
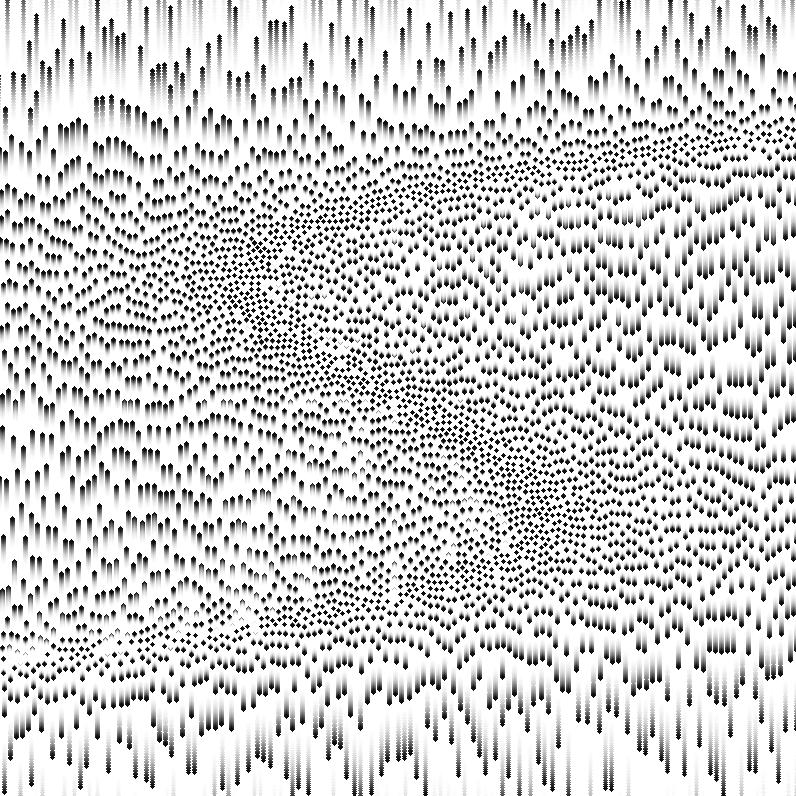
Fig. 1.4(b) shows a
two-dimensional visualization of a specific member out of
the class of Lotka-Volterra models
(cf. Eq. 1.2,
![]() ).
The dynamics caused by this
dynamical system is directly encoded by the used
visualization technique.
).
The dynamics caused by this
dynamical system is directly encoded by the used
visualization technique.
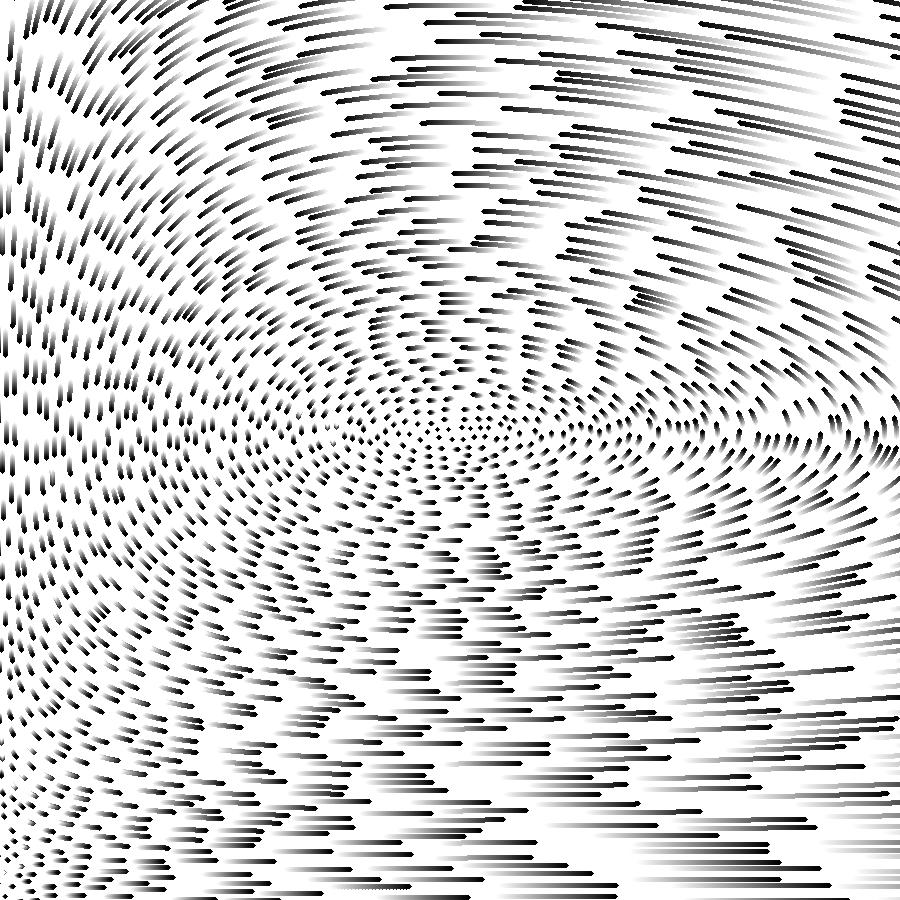
Fig. 1.5(a) shows a visualization of a three-dimensional dynamical system, restricted to a spherical sub-space around the critical point of this system. Although phase space is three-dimensional this local technique avoids visual overloading while still preserving direct visualization of the system dynamics.
![\framebox[\textwidth]{
\begin{tabular*}{.93\linewidth}{@{}@{\extracolsep{\fill}...
...ht=62mm]{pics/ds-vis.03.ps}
\\ {\small{}(a)}
& {\small{}(b)}
\end{tabular*} }](img40.gif) |
The visualization of system abstractions, on the other hand, means to first derive second-level properties of the flow like critical points and separatrices, and then visualize the abstract information. At any scale of the underlying data, analysis can be done first, and visualization used afterwards to convey the results. Characteristic structures like, e.g., critical points (system states where there is no motion at all) or cycles (states of a dynamical systems which reoccur after a certain period of evolution), may be extracted using dynamical system analysis, and mapped to visualization cues afterwards.
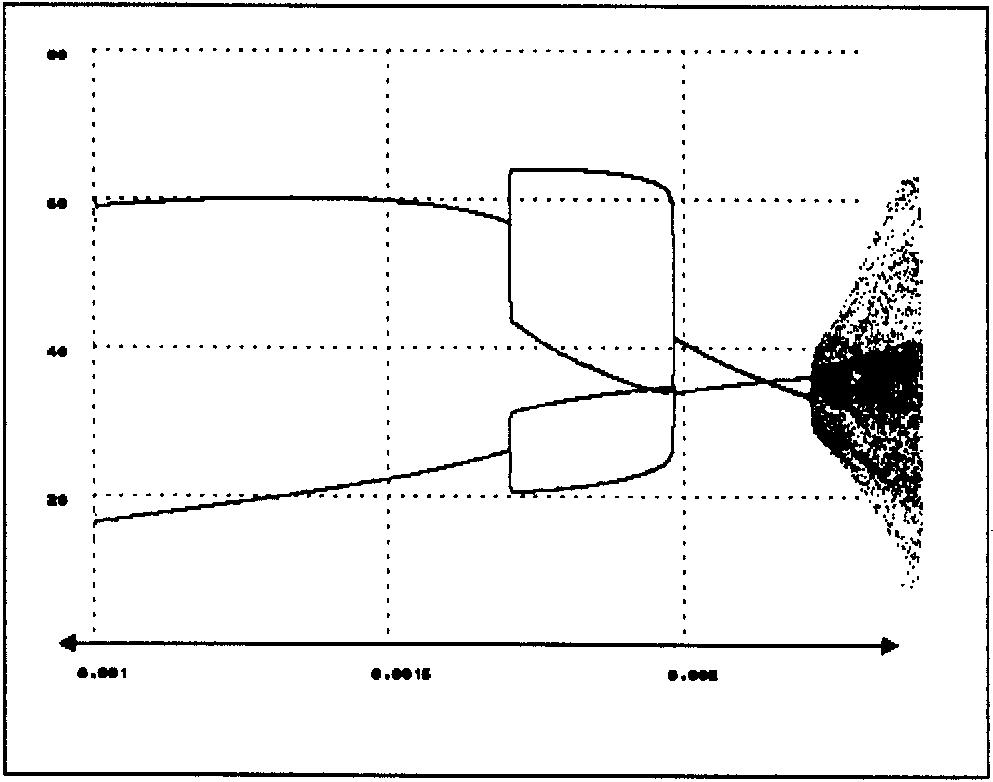
Bifurcation diagrams like the one shown in
Fig. 1.5(b) depict (an approximation of) the
stable sub-set for each (discrete) dynamical system (1D, vertical
axis) in a one-dimensional class (horizontal axis). Bifurcations
occur at parameter-value changes, where the stable sub-set changes
qualitatively, e.g., at points of a phase doubling or a torus
beak-down [77].
![\framebox[\textwidth]{
\begin{tabular*}{.93\linewidth}{@{}@{\extracolsep{\fill}...
...height=59mm]{pics/wijk2.ps}
\\ {\small{}(a)}
& {\small{}(b)}
\end{tabular*} }](img44.gif) |
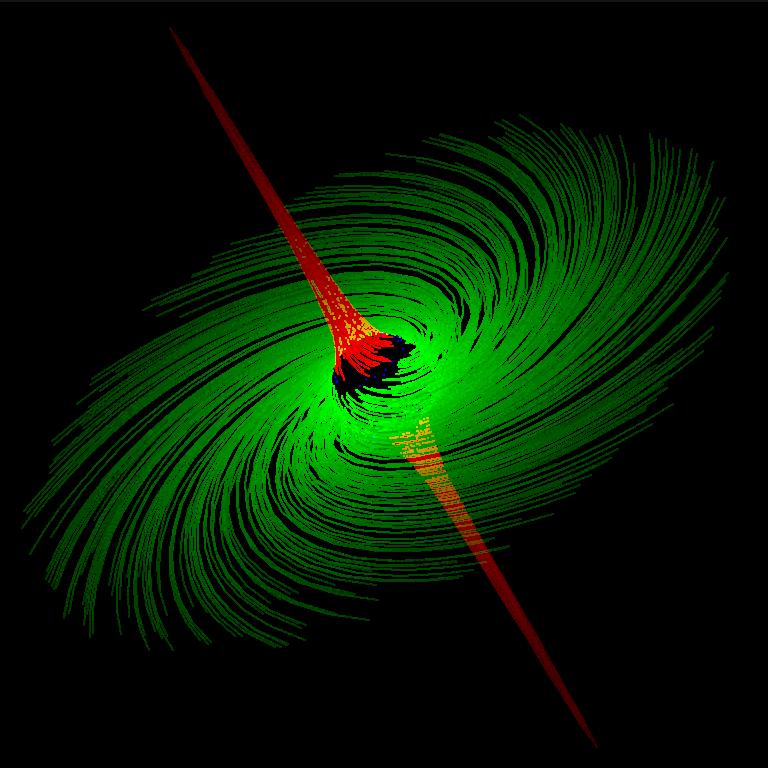
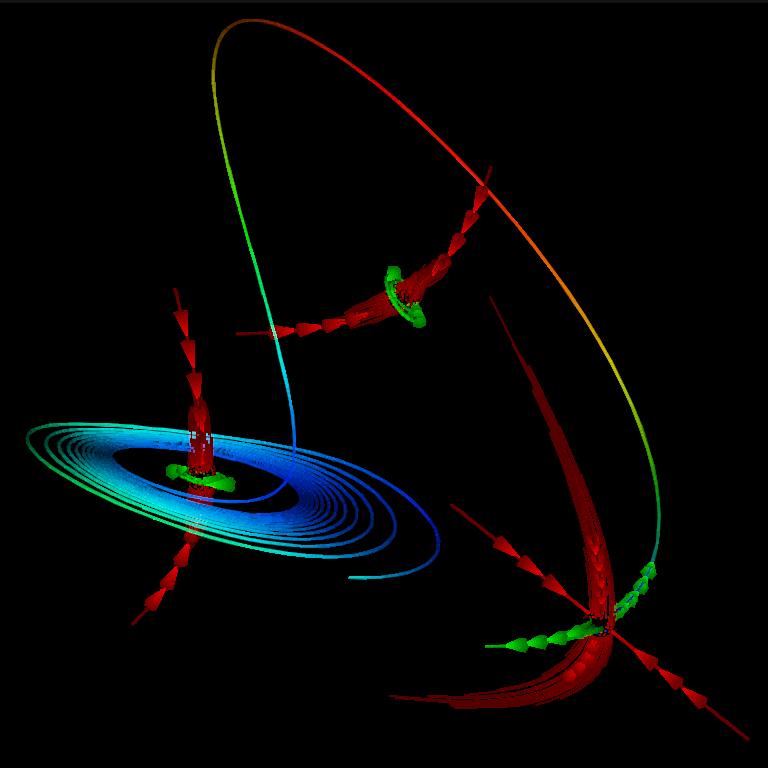
A typical result of visualizing a dynamical system after doing some analysis first, can be seen in Fig. 1.6(a). The critical points are visualized together with the results of an eigenvector and eigenvalue analysis of the system's Jacobian matrix at these points.
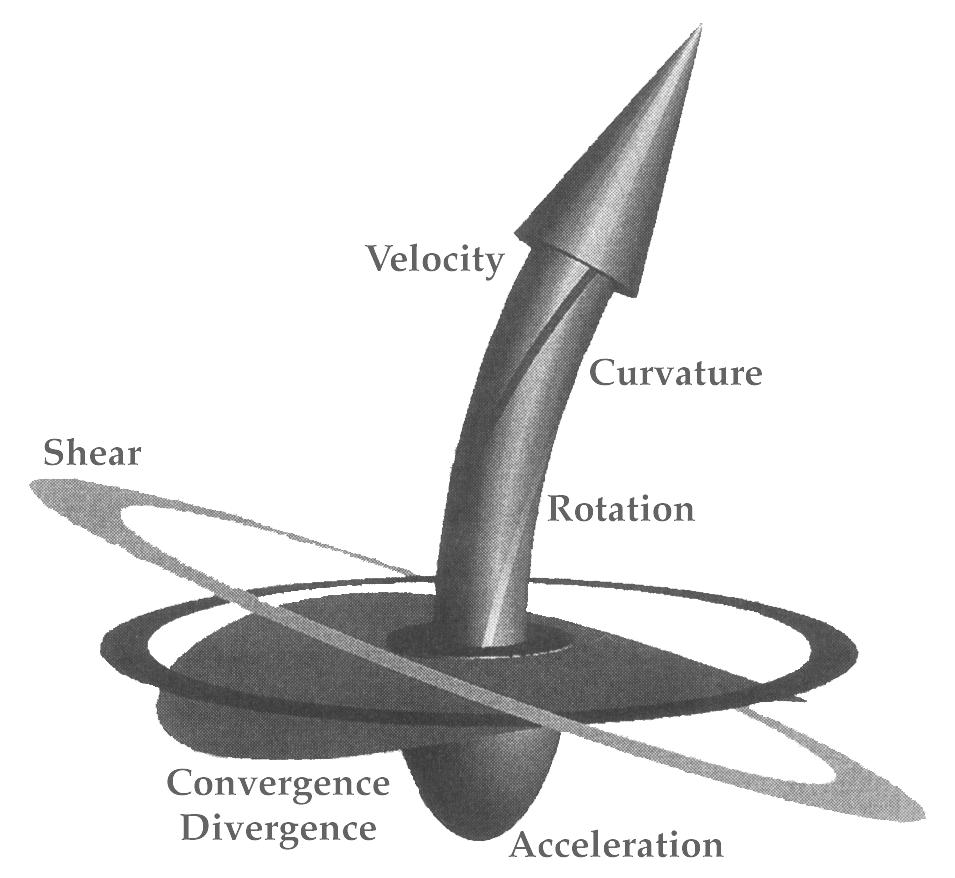
A sample result of visualizing derived data at specific sub-sets of phase space [19] is shown in Fig. 1.6(b). At a specific location in 3D phase space the Jacobian matrix of the dynamical system is analyzed and the derived (local) properties like, direction of flow, velocity, acceleration, rotation, etc., are visualized using a glyph.
An overview of the state of the art in
visualizing dynamical systems and related fields is given in
Chapter 2. Notes about terms and the local analysis of
dynamical systems are given afterwards. Then,
four techniques, namely, visualization by the use of stream arrows,
visualization based on Poincaré maps, visualizing critical
points, and the visualization of characteristic
trajectories, are described in Chapters 4,
5, 6, and 7,
respectively. A note on the implementation of
these visualization methods is appended (Chapt. 8).
Finally, a short
summary is given, and conclusions are drawn. After the
bibliography, a glossary of some important terms related to
dynamical systems is given. The thesis concludes with appendices
on the notation used and descriptions of the sample dynamical
systems used.
![\framebox[\textwidth]{
\includegraphics[scale=.8]{figs/class-b.eps}
}](img38.gif)
![\framebox[\textwidth]{
\begin{tabular*}{.93\linewidth}{@{}@{\extracolsep{\fill}...
...eight=55mm]{pics/bif-01.ps}
\\ {\small{}(a)}
& {\small{}(b)}
\end{tabular*} }](img43.gif)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}